




Описание
Оригинальный Holybro Pixhawk 4 мини PX4 контроллер полета STM32F765 Ublo * Neo-M8N gps глонасс модуль питания Pixhawk PM06 V2 Fr FPV RC дрон
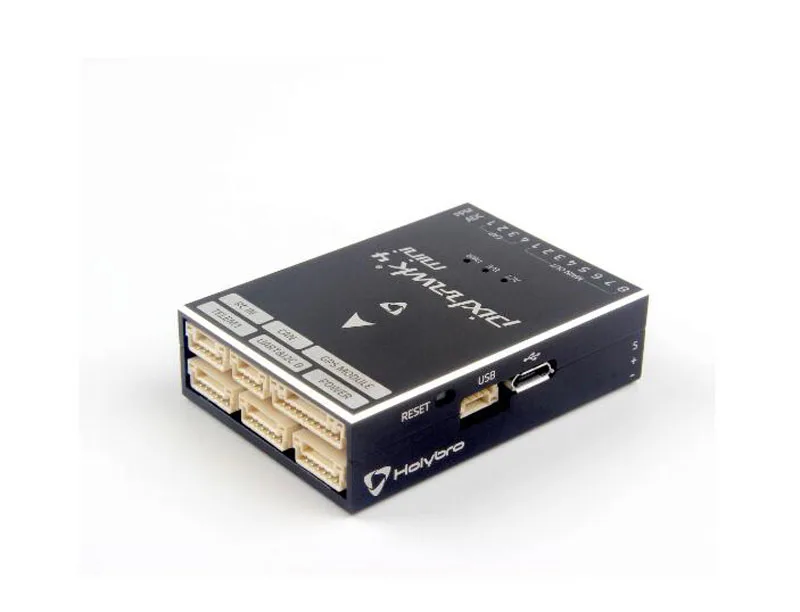
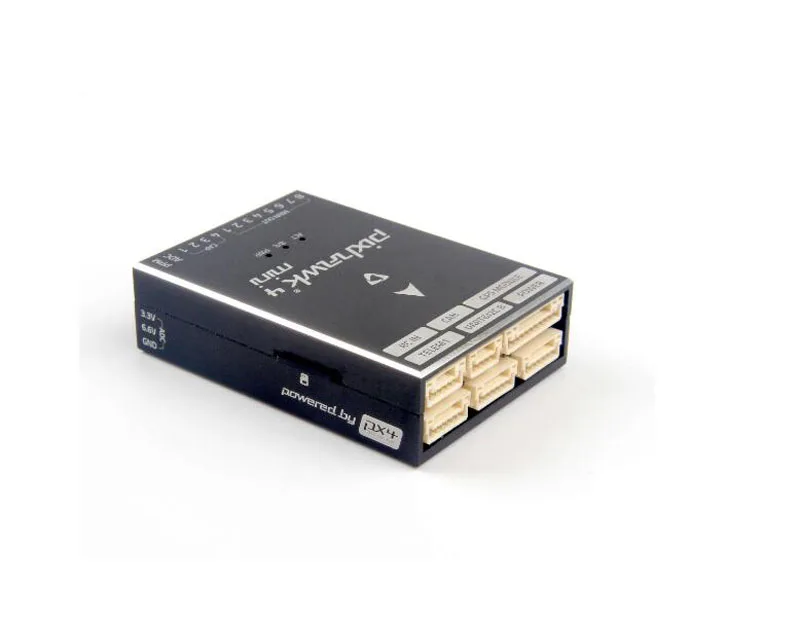
Контроллер полета Pixhawk 4 Mini
Pixhawk 4 Mini autopilot предназначен для инженеров и любителей, которые ищут возможности Pixhawk 4, но работают с меньшими дронами. Pixhawk 4 Mini использует процессор FMU и память от Pixhawk 4, устраняя при этом интерфейсы, которые обычно не используются. Это позволяет Pixhawk 4 Mini быть достаточно маленьким, чтобы поместиться в 250 мм гоночного дрона.
Pixhawk 4 Mini был разработан и разработан в сотрудничестве с Holybro и Auterion. Он основан на стандарте дизайна Pixhawk FMUv5 и оптимизирован для запуска программного обеспечения управления полетом PX4.
Версия мини-прошивки Pixhawk4: 1.8.0 dev
Быстрый резюме
-Основной процессор FMU: STM32F765
32 бит Arm Cortex-M7, 216 мгц, 2 мб памяти, 512кб ram
-Бортовые датчики:
Accel/Gyro: ICM-20689
Accel/гироскоп: BMI055
Магнитометр: IST8310
Барометр: MS5611
-Gps: ublo * Neo-M8N gps/глонасс приемник; встроенный магнитометр IST8310
-Интерфейсы:
8 pwm-выходы
4 выделенных PWM/Capture входов на FMU
Выделенный вход R/C для CPPM
Выделенный вход R/C для Spektr **/DSM и S. Bus с аналоговым/шим RSSI входом
3 последовательных порта общего назначения
2 I2C порты
3 шинам SPI
1 canbus для CAN ESC
Аналоговые входы для напряжения/тока батареи
2 дополнительных аналоговых входных сигналов
-Мощность Системы:
Входная мощность кирпича: 4,75-5,5 в
Вход питания USB: 4,75-5,25 в
Вход сервопривода: 0-24 V
Максимальный ток чувствительности: 120A
-Вес и размеры:
Размеры: 38x55x15,5 мм
-Другое характеристики:
Рабочая температура:-40-85 градусов
Посылка в комплекте
Pix4 имеет алюминиевый чехол
Комплект 1: (с gps)
Pixhawk4 мини * 1
Модуль gps Pixhawk4 * 1
PM06 V2 плата управления питанием * 1
Плата сплиттера iec * 1
6-6 pin кабель (питание) * 1
4-4 pin кабель (CAN) * 1
От 6 до 4 pin кабель (для передачи данных) * 1
6-4 pin и 4 pin "Y" кабель * 1
6-6 pin кабель (отладка) * 1
PPM/SBUS выход кабель * 1
XSR приемник кабель * 1
Приемник dsmx кабель * 1
Кабель приемника SBUS * 1
Кабель USB * 1
'Х' тип складной пьедестал крепление * 1
70 мм и 140 мм углеродный стержень stand off * 2
Набор пены * 1
Pixhawk4 мини краткое руководство * 1
Комплект 2: (без gps)
Pixhawk4 мини * 1
PM06 V2 плата управления питанием * 1
Плата сплиттера iec * 1
6-6 pin кабель (питание) * 1
4-4 pin кабель (CAN) * 1
От 6 до 4 pin кабель (для передачи данных) * 1
6-4 pin и 4 pin "Y" кабель * 1
6-6 pin кабель (отладка) * 1
PPM/SBUS выход кабель * 1
XSR приемник кабель * 1
Приемник dsmx кабель * 1
Кабель приемника SBUS * 1
Кабель USB * 1
Набор пены * 1
Pixhawk4 мини краткое руководство * 1



Раскройте все аспекты товара "Holybro Pixhawk 4 мини PX4 Контроллер полета STM32F765 Ubx Neo-M8N gps ГЛОНАСС модуль питания PM06 V2 Fr FPV Дрон": цены, фотографии, видеообзоры, описание и технические характеристики. Мы предоставляем всю необходимую информацию для взвешенного решения о покупке. Погрузитесь в детальную страницу, чтобы полностью осознать, что может предложить этот продукт. Принимайте обоснованные решения, опираясь на факты и детали. Узнайте все о "Holybro Pixhawk 4 мини PX4 Контроллер полета STM32F765 Ubx Neo-M8N gps ГЛОНАСС модуль питания PM06 V2 Fr FPV Дрон" прямо сейчас!
Характеристики
- Бренд
- SHUAICHI
- Материал
- Комбинированный материал
- Номер модели
- Holybro
- Тип транспорта
- Самолеты
- Расходный материал для инструментов
- Сборное стекло
- Периферийные устройства для дистанционного управления
- Other
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Детали для тюнинга и запчасти
- Other
- Детали дистанционного управления и комплектующие
- Other
- Main FMU Processor
- STM32F765
- Accel/Gyro
- ICM-20689 / BMI055
- Magnetometer
- IST8310
- Barometer
- MS5611
- GPS
- ublo* Neo-M8N GPS/GLONASS receiver, integrated magnetometer IST8310
- Power Brick Input
- 4.75-5.5V
- USB Power Input
- 4.75-5.25V
- Servo Rail Input
- 0-24V
- Max current sensing
- 120A
- Dimensions
- 38x55x15.5mm
- Operating temperature
- -40 - 85 centi degree
- Interface 1
- 8 PWM outputs
- Interface 2
- 4 dedicated PWM/Capture inputs on FMU
- Interface 3
- Dedicated R/C input for CPPM
- Interface 4
- Dedicated R/C input for Spektr** / DSM and S.Bus with analog / PWM RSS
- Interface 5
- 3 general purpose serial ports
- Interface 6
- 2 I2C ports
- Interface 7
- 3 SPI buses
- Interface 8
- 1 CANBuses for CAN ESC
- Interface 9
- Analog inputs for voltage / current of battery
- Interface 10
- 2 additional analog input
Комплементарные товары





